Visual Search Coursework
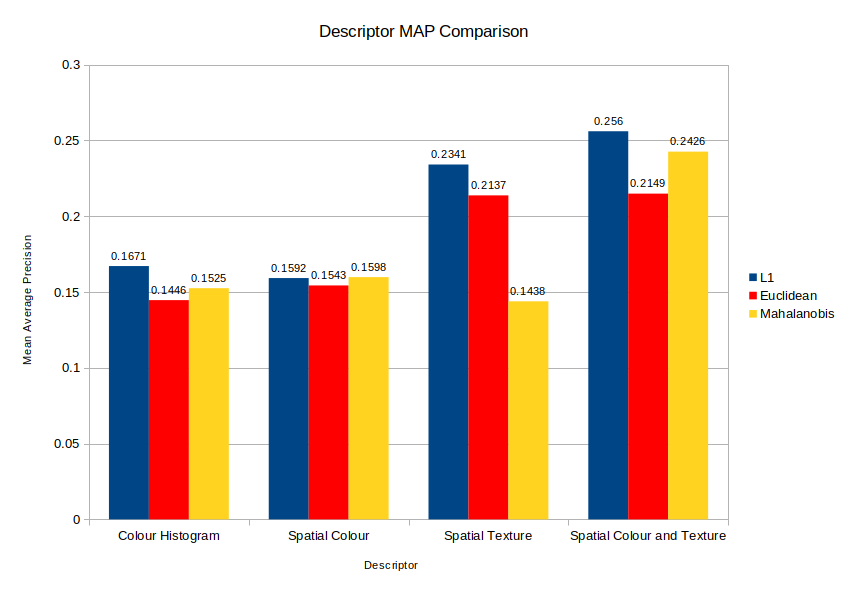
Investigation into different methods of visual search including colour histograms, spatial colour, spatial texture and a combination of the two using MATLAB and the MSRCv2 dataset. A copy of the report can be seen here. Submitted as part of the third year EE3032 Computer Vision & Pattern Recognition module, this piece achieved full marks.
Code
/data - pulled images and spreadsheet of data /descriptor - functions for extracting descriptors /distance - functions for measuring distance between descriptors /util - util functions such as toGreyscale and EVD
There are two types of script, ones that run a category response once (cvpr_visualsearch_) and ones that iteratively generate new descriptors to run queries on (parameter_)
_query_set operates using either L1 or L2 norm on the query set _pca generates an eigenmodel from the descriptors and computes mahalanobis distance _rand_image picks a random query image from each category to iterate over, no results from this script are in the paper
The cvpr_visualsearch_* scripts load descriptors from folders and perform a category response test on them.
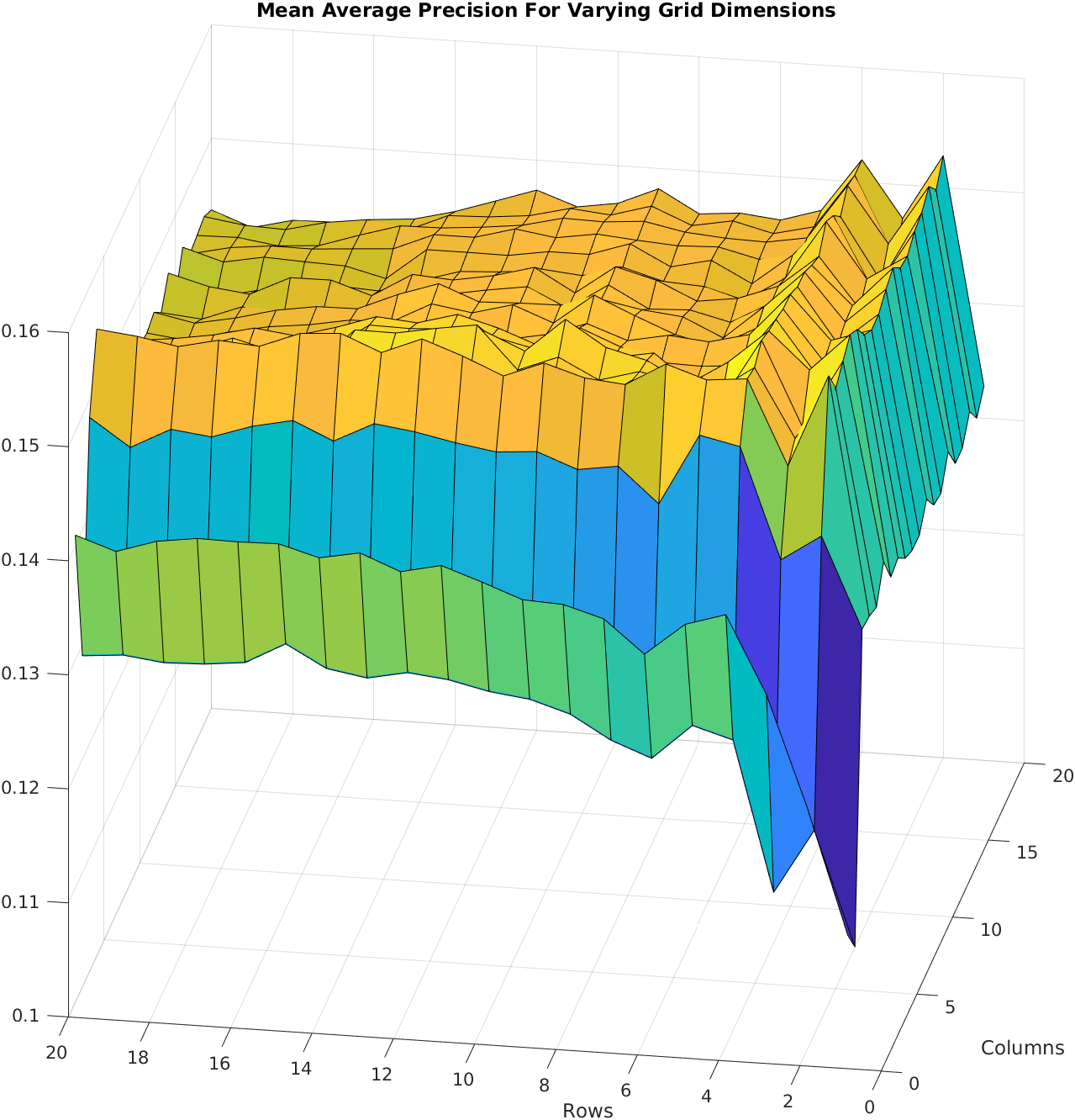
The parameter_* scripts were used to generate iterative parameter results for descriptors. Effectively the query code from the cvpr_visualsearch_* files have been prefaced with descriptor generators that as a whole iterate over parameters instead of loading them from files.