finished code, beginning writeup
This commit is contained in:
parent
7f4775fc9c
commit
534b42f4ef
2
.gitignore
vendored
2
.gitignore
vendored
@ -4,7 +4,7 @@ __pycache__/
|
||||
*$py.class
|
||||
|
||||
*.pdf
|
||||
*~
|
||||
*~*
|
||||
|
||||
# C extensions
|
||||
*.so
|
||||
|
||||
312
markov.ipynb
312
markov.ipynb
File diff suppressed because one or more lines are too long
127
markov.py
127
markov.py
@ -1,11 +1,9 @@
|
||||
from dataclasses import dataclass, field
|
||||
from typing import List
|
||||
import numpy as np
|
||||
from numpy import log as ln
|
||||
|
||||
from maths import gaussian
|
||||
|
||||
class MarkovModel:
|
||||
"""Describes a single training iteration including likelihoods and reestimation params"""
|
||||
|
||||
def __init__(self, states: list, observations: list = list(), state_transitions: list = list()):
|
||||
self.observations = observations
|
||||
@ -36,15 +34,29 @@ class MarkovModel:
|
||||
return self.get_other_state_index(state_in - 1) + 1
|
||||
|
||||
def populate(self):
|
||||
"""Calculate all likelihoods and both P(O|model)'s"""
|
||||
|
||||
self.populate_forward()
|
||||
self.calculate_p_obs_forward()
|
||||
self.populate_backward()
|
||||
self.calculate_p_obs_backward()
|
||||
self.populate_occupation()
|
||||
return self
|
||||
|
||||
@property
|
||||
def observation_likelihood(self):
|
||||
"""abstraction for getting P(O|model) for future calculations (occupation/transition)"""
|
||||
return self.p_obs_forward
|
||||
|
||||
####################################
|
||||
# Likelihoods
|
||||
####################################
|
||||
|
||||
def populate_forward(self):
|
||||
"""Populate forward likelihoods for all states/times"""
|
||||
|
||||
for t, observation in enumerate(self.observations): # iterate through observations (time)
|
||||
for state_index, state in enumerate(self.states):
|
||||
for state_index, state in enumerate(self.states): # both states at each step
|
||||
|
||||
state_number = state_index + 1 # for easier reading (arrays 0-indexed, numbers start at 1)
|
||||
|
||||
@ -62,28 +74,29 @@ class MarkovModel:
|
||||
|
||||
self.forward[state_index, t] = (this_to_this + other_to_this) * gaussian(observation, state.mean, state.std_dev)
|
||||
|
||||
@property
|
||||
def observation_likelihood(self):
|
||||
"""abstraction for getting p(obs|model) for future calculations (occupation/transition)"""
|
||||
return self.p_obs_forward
|
||||
return self.forward
|
||||
|
||||
def calculate_p_obs_forward(self):
|
||||
"""Calculate, store and return P(O|model) going forwards"""
|
||||
|
||||
sum = 0
|
||||
for state_index, final_likelihood in enumerate(self.forward[:, -1]):
|
||||
for state_index, final_likelihood in enumerate(self.forward[:, -1]):
|
||||
sum += final_likelihood * self.state_transitions[state_index + 1, -1] # get exit prob from state transitions
|
||||
|
||||
self.p_obs_forward = sum
|
||||
return sum
|
||||
|
||||
def populate_backward(self):
|
||||
"""Populate backward likelihoods for all states/times"""
|
||||
|
||||
# initialise from exit probabilities
|
||||
# initialise with exit probabilities
|
||||
self.backward[:, -1] = self.state_transitions[1:len(self.states) + 1, -1]
|
||||
|
||||
# below iterator skips first observation (will be used when finalising P(O|model)) then reverses list [::-1]
|
||||
for t, observation in list(enumerate(self.observations[1:]))[::-1]: # iterate backwards through observations (time)
|
||||
|
||||
# print(t, observation)
|
||||
for state_index, state in enumerate(self.states):
|
||||
for state_index in range(len(self.states)):
|
||||
|
||||
state_number = state_index + 1 # for easier reading (arrays 0-indexed, numbers start at 1)
|
||||
|
||||
@ -95,30 +108,45 @@ class MarkovModel:
|
||||
# observation for transitions from the other state
|
||||
other_state_gaussian = gaussian(observation, self.states[other_index].mean, self.states[other_index].std_dev)
|
||||
|
||||
# beta * a * b
|
||||
this_from_this = self.backward[state_index, t + 1] * self.state_transitions[state_number, state_number] * this_state_gaussian
|
||||
other_from_this = self.backward[other_index, t + 1] * self.state_transitions[other_number, state_number] * other_state_gaussian
|
||||
# a * b * beta
|
||||
this_from_this = self.state_transitions[state_number, state_number] * this_state_gaussian * self.backward[state_index, t + 1]
|
||||
other_from_this = self.state_transitions[state_number, other_number] * other_state_gaussian * self.backward[other_index, t + 1]
|
||||
|
||||
self.backward[state_index, t] = (this_from_this + other_from_this)
|
||||
self.backward[state_index, t] = this_from_this + other_from_this
|
||||
|
||||
return self.backward
|
||||
|
||||
def calculate_p_obs_backward(self):
|
||||
"""Calculate, store and return P(O|model) going backwards"""
|
||||
|
||||
sum = 0
|
||||
for state_index, initial_likelihood in enumerate(self.backward[:, 0]):
|
||||
# pi * b * beta
|
||||
sum += self.state_transitions[0, state_index + 1] * gaussian(self.observations[0], self.states[state_index].mean, self.states[state_index].std_dev) * initial_likelihood
|
||||
|
||||
pi = self.state_transitions[0, state_index + 1]
|
||||
b = gaussian(self.observations[0], self.states[state_index].mean, self.states[state_index].std_dev)
|
||||
beta = initial_likelihood
|
||||
|
||||
sum += pi * b * beta
|
||||
|
||||
self.p_obs_backward = sum
|
||||
return sum
|
||||
|
||||
def populate_occupation(self):
|
||||
for t, observation in enumerate(self.observations): # iterate through observations (time)
|
||||
for state_index, state in enumerate(self.states):
|
||||
"""Populate occupation likelihoods for all states/times"""
|
||||
|
||||
for t in range(len(self.observations)): # iterate through observations (time)
|
||||
for state_index in range(len(self.states)):
|
||||
|
||||
forward_backward = self.forward[state_index, t] * self.backward[state_index, t]
|
||||
self.occupation[state_index, t] = forward_backward / self.observation_likelihood
|
||||
|
||||
return self.occupation
|
||||
|
||||
def transition_likelihood(self, from_index, to_index, t):
|
||||
"""Get specific transition likelihood given state index either side and the timestep"""
|
||||
#from_index = i, from equations in the notes
|
||||
#to_index = j, from equations in the notes
|
||||
|
||||
if t == 0:
|
||||
print("no transition likelihood for t == 0")
|
||||
|
||||
@ -129,31 +157,62 @@ class MarkovModel:
|
||||
|
||||
return (forward * transition * emission * backward) / self.observation_likelihood
|
||||
|
||||
def baum_welch_state_transitions(self):
|
||||
####################################
|
||||
# Baum-Welch Re-estimations
|
||||
####################################
|
||||
|
||||
new_transitions = np.zeros((len(self.states), len(self.states)))
|
||||
def reestimated_state_transitions(self):
|
||||
"""Re-estimate state transitions using Baum-Welch training (Not on mark scheme)"""
|
||||
|
||||
length = len(self.states)
|
||||
new_transitions = np.zeros((length, length))
|
||||
|
||||
# i
|
||||
for from_index, from_state in enumerate(self.states):
|
||||
for from_index in range(length):
|
||||
# j
|
||||
for to_index, to_state in enumerate(self.states):
|
||||
|
||||
transition_sum = 0
|
||||
for t in range(1, len(self.observations)):
|
||||
transition_sum += self.transition_likelihood(from_index, to_index, t)
|
||||
for to_index in range(length):
|
||||
|
||||
occupation_sum = 0
|
||||
for t in range(0, len(self.observations)):
|
||||
occupation_sum = self.occupation[to_index, t]
|
||||
# numerator iterates from t = 1 (when 0 indexing, 2 in the notes)
|
||||
transition_sum = sum(self.transition_likelihood(from_index, to_index, t) for t in range(1, len(self.observations)))
|
||||
occupation_sum = sum(self.occupation[from_index, t] for t in range(0, len(self.observations)))
|
||||
|
||||
new_transitions[from_index, to_index] = transition_sum / occupation_sum
|
||||
|
||||
return new_transitions
|
||||
|
||||
def reestimated_state_mean(self, state_index):
|
||||
"""Re-estimate the gaussian mean for a state using occupation likelihoods, baum-welch"""
|
||||
|
||||
numerator = 0 # sum over observations( occupation * observation )
|
||||
denominator = 0 # sum over observations( occupation )
|
||||
for t, observation in enumerate(self.observations): # iterate through observations (time)
|
||||
|
||||
occupation_likelihood = self.occupation[state_index, t]
|
||||
|
||||
numerator += occupation_likelihood * observation
|
||||
denominator += occupation_likelihood
|
||||
|
||||
return numerator / denominator
|
||||
|
||||
def reestimated_mean(self):
|
||||
"""Get all re-estimated gaussian means using occupation likelihoods"""
|
||||
return [self.reestimated_state_mean(idx) for idx in range(len(self.states))]
|
||||
|
||||
|
||||
# child object to replace normal prob/likeli operations with log prob operations (normal prob for debugging)
|
||||
class LogMarkovModel(MarkovModel):
|
||||
def reestimated_state_variance(self, state_index):
|
||||
"""Re-estimate the gaussian variance for a state using occupation likelihoods, baum-welch"""
|
||||
|
||||
numerator = 0 # sum over observations( occupation * (observation - mean)^2 )
|
||||
denominator = 0 # sum over observations( occupation )
|
||||
for t, observation in enumerate(self.observations): # iterate through observations (time)
|
||||
|
||||
def log_state_transitions(self):
|
||||
self.state_transitions = ln(self.state_transitions)
|
||||
occupation_likelihood = self.occupation[state_index, t]
|
||||
|
||||
numerator += occupation_likelihood * pow(observation - self.states[state_index].mean, 2)
|
||||
denominator += occupation_likelihood
|
||||
|
||||
return numerator / denominator
|
||||
|
||||
def reestimated_variance(self):
|
||||
"""Get all re-estimated gaussian variances using occupation likelihoods"""
|
||||
return [self.reestimated_state_variance(idx) for idx in range(len(self.states))]
|
||||
|
||||
10
markovlog.py
Normal file
10
markovlog.py
Normal file
@ -0,0 +1,10 @@
|
||||
from numpy import log as ln
|
||||
|
||||
from maths import gaussian
|
||||
from markov import MarkovModel
|
||||
|
||||
# child object to replace normal prob/likeli operations with log prob operations (normal prob for debugging)
|
||||
class LogMarkovModel(MarkovModel):
|
||||
|
||||
def log_state_transitions(self):
|
||||
self.state_transitions = ln(self.state_transitions)
|
||||
255
notebook.py
Normal file
255
notebook.py
Normal file
@ -0,0 +1,255 @@
|
||||
# %%
|
||||
#IMPORTS AND COMMON VARIABLES
|
||||
import matplotlib.pyplot as plt
|
||||
from matplotlib import cm
|
||||
import numpy as np
|
||||
from math import sqrt
|
||||
|
||||
from constants import *
|
||||
from maths import gaussian
|
||||
from markov import MarkovModel
|
||||
from markovlog import LogMarkovModel
|
||||
|
||||
x = np.linspace(-4, 8, 120) # x values for figures
|
||||
x_label = "Observation Space"
|
||||
y_label = "Probability Density"
|
||||
|
||||
# %% [markdown]
|
||||
# State Probability Functions (1)
|
||||
# ===================
|
||||
|
||||
# %%
|
||||
state_1_y = [gaussian(i, state1.mean, state1.std_dev) for i in x]
|
||||
state_2_y = [gaussian(i, state2.mean, state2.std_dev) for i in x]
|
||||
|
||||
plt.plot(x, state_1_y, c='r', label="State 1")
|
||||
plt.plot(x, state_2_y, c='b', label="State 2")
|
||||
|
||||
plt.legend()
|
||||
plt.title("State Probability Density Functions")
|
||||
|
||||
plt.xlabel(x_label)
|
||||
plt.ylabel(y_label)
|
||||
plt.grid(linestyle="--")
|
||||
|
||||
plt.show()
|
||||
|
||||
# %% [markdown]
|
||||
# Output Probability Densities (2)
|
||||
# ==========
|
||||
|
||||
# %%
|
||||
for obs in observations:
|
||||
print(f'{obs} -> State 1: {gaussian(obs, state1.mean, state1.std_dev)}, State 2: {gaussian(obs, state2.mean, state2.std_dev)}')
|
||||
|
||||
|
||||
# %%
|
||||
state_1_y = [gaussian(i, state1.mean, state1.std_dev) for i in x]
|
||||
state_2_y = [gaussian(i, state2.mean, state2.std_dev) for i in x]
|
||||
|
||||
plt.plot(x, state_1_y, c='r', label="State 1")
|
||||
plt.plot(x, state_2_y, c='b', label="State 2")
|
||||
|
||||
plt.legend()
|
||||
plt.title("State Probability Density Functions With Observations")
|
||||
|
||||
plt.xlabel(x_label)
|
||||
plt.ylabel(y_label)
|
||||
plt.grid(linestyle="--")
|
||||
|
||||
state1_pd = [gaussian(i, state1.mean, state1.std_dev) for i in observations]
|
||||
state2_pd = [gaussian(i, state2.mean, state2.std_dev) for i in observations]
|
||||
|
||||
#############################################
|
||||
# Observation Marks
|
||||
#############################################
|
||||
|
||||
config = {
|
||||
"s": 65,
|
||||
"marker": 'x'
|
||||
}
|
||||
|
||||
plt.scatter(observations, state1_pd, color=(0.5, 0, 0), **config)
|
||||
plt.scatter(observations, state2_pd, color=(0, 0, 0.5), **config)
|
||||
|
||||
plt.show()
|
||||
|
||||
# %% [markdown]
|
||||
# # Forward Procedure (3)
|
||||
|
||||
# %%
|
||||
model = MarkovModel(states=[state1, state2], observations=observations, state_transitions=state_transition)
|
||||
model.populate_forward()
|
||||
|
||||
print(model.forward)
|
||||
|
||||
forward = model.forward
|
||||
model.calculate_p_obs_forward()
|
||||
|
||||
# %% [markdown]
|
||||
# # Backward Procedure (4)
|
||||
|
||||
# %%
|
||||
model = MarkovModel(states=[state1, state2], observations=observations, state_transitions=state_transition)
|
||||
model.populate_backward()
|
||||
|
||||
print(model.backward)
|
||||
|
||||
backward = model.backward
|
||||
model.calculate_p_obs_backward()
|
||||
|
||||
# %% [markdown]
|
||||
# # Compare Forward/Backward Final
|
||||
|
||||
# %%
|
||||
model = MarkovModel(states=[state1, state2], observations=observations, state_transitions=state_transition)
|
||||
model.populate_forward()
|
||||
model.populate_backward()
|
||||
|
||||
print("forward:", model.calculate_p_obs_forward())
|
||||
print("backward:", model.calculate_p_obs_backward())
|
||||
|
||||
print("diff: ", model.p_obs_forward - model.p_obs_backward)
|
||||
|
||||
# %% [markdown]
|
||||
# # Occupation Likelihoods (5)
|
||||
|
||||
# %%
|
||||
model = MarkovModel(states=[state1, state2], observations=observations, state_transitions=state_transition).populate()
|
||||
|
||||
occupation = model.occupation
|
||||
print(model.occupation)
|
||||
|
||||
# %% [markdown]
|
||||
# # Re-estimate Mean & Variance (6)
|
||||
|
||||
# %%
|
||||
model = MarkovModel(states=[state1, state2], observations=observations, state_transitions=state_transition).populate()
|
||||
|
||||
print("mean: ", [state1.mean, state2.mean])
|
||||
print("variance: ", [state1.variance, state2.variance])
|
||||
print()
|
||||
|
||||
print("mean: ", model.reestimated_mean())
|
||||
print("variance: ", model.reestimated_variance())
|
||||
|
||||
# %% [markdown]
|
||||
# New PDFs (7)
|
||||
# ===================
|
||||
|
||||
# %%
|
||||
model = MarkovModel(states=[state1, state2], observations=observations, state_transitions=state_transition).populate()
|
||||
|
||||
new_mean = model.reestimated_mean()
|
||||
new_var = model.reestimated_variance()
|
||||
new_std_dev = [sqrt(x) for x in new_var]
|
||||
|
||||
state_1_y = [gaussian(i, new_mean[0], new_std_dev[0]) for i in x]
|
||||
state_2_y = [gaussian(i, new_mean[1], new_std_dev[1]) for i in x]
|
||||
|
||||
plt.plot(x, state_1_y, c='r', label="State 1")
|
||||
plt.plot(x, state_2_y, c='b', label="State 2")
|
||||
|
||||
plt.legend()
|
||||
plt.title("Re-estimated Probability Density Functions")
|
||||
|
||||
plt.xlabel(x_label)
|
||||
plt.ylabel(y_label)
|
||||
plt.grid(linestyle="--")
|
||||
|
||||
plt.show()
|
||||
|
||||
# %% [markdown]
|
||||
# # Compare PDFs (7)
|
||||
|
||||
# %%
|
||||
model = MarkovModel(states=[state1, state2], observations=observations, state_transitions=state_transition).populate()
|
||||
|
||||
new_mean = model.reestimated_mean()
|
||||
new_var = model.reestimated_variance()
|
||||
new_std_dev = [sqrt(x) for x in new_var]
|
||||
|
||||
#######################################
|
||||
# Original
|
||||
#######################################
|
||||
state_1_y = [gaussian(i, state1.mean, state1.std_dev) for i in x]
|
||||
state_2_y = [gaussian(i, state2.mean, state2.std_dev) for i in x]
|
||||
plt.plot(x, state_1_y, '--', c='r', label="State 1", linewidth=1.0)
|
||||
plt.plot(x, state_2_y, '--', c='b', label="State 2", linewidth=1.0)
|
||||
|
||||
#######################################
|
||||
# Re-Estimated
|
||||
#######################################
|
||||
state_1_new_y = [gaussian(i, new_mean[0], new_std_dev[0]) for i in x]
|
||||
state_2_new_y = [gaussian(i, new_mean[1], new_std_dev[1]) for i in x]
|
||||
plt.plot(x, state_1_new_y, c='r', label="New State 1")
|
||||
plt.plot(x, state_2_new_y, c='b', label="New State 2")
|
||||
|
||||
plt.legend()
|
||||
plt.title("Re-estimated Probability Density Functions")
|
||||
|
||||
plt.xlabel(x_label)
|
||||
plt.ylabel(y_label)
|
||||
plt.grid(linestyle="--")
|
||||
|
||||
plt.show()
|
||||
|
||||
# %% [markdown]
|
||||
# # Multiple Iterations
|
||||
|
||||
# %%
|
||||
iterations = 5
|
||||
|
||||
mean = [state1.mean, state2.mean]
|
||||
var = [state1.variance, state2.variance]
|
||||
|
||||
plt.plot(x, [gaussian(i, mean[0], sqrt(var[0])) for i in x], '--', c='r', linewidth=1.0)
|
||||
plt.plot(x, [gaussian(i, mean[1], sqrt(var[1])) for i in x], '--', c='b', linewidth=1.0)
|
||||
|
||||
for i in range(iterations):
|
||||
model = MarkovModel(states=[State(mean[0], var[0], state1.entry, state1.exit), State(mean[1], var[1], state2.entry, state2.exit)],
|
||||
observations=observations,
|
||||
state_transitions=state_transition)
|
||||
model.populate()
|
||||
|
||||
mean = model.reestimated_mean()
|
||||
var = model.reestimated_variance()
|
||||
|
||||
print(f"mean ({i}): ", mean)
|
||||
print(f"var ({i}): ", var)
|
||||
print()
|
||||
|
||||
state_1_y = [gaussian(i, mean[0], sqrt(var[0])) for i in x]
|
||||
state_2_y = [gaussian(i, mean[1], sqrt(var[1])) for i in x]
|
||||
|
||||
style = '--'
|
||||
linewidth = 1.0
|
||||
if i == iterations - 1:
|
||||
style = '-'
|
||||
linewidth = 2.0
|
||||
|
||||
plt.plot(x, state_1_y, style, c='r', linewidth=linewidth)
|
||||
plt.plot(x, state_2_y, style, c='b', linewidth=linewidth)
|
||||
|
||||
plt.title("Probability Density Function Iterations")
|
||||
|
||||
plt.xlabel(x_label)
|
||||
plt.ylabel(y_label)
|
||||
plt.grid(linestyle="--")
|
||||
|
||||
plt.show()
|
||||
|
||||
# %% [markdown]
|
||||
# # Baum-Welch State Transition Re-estimations
|
||||
|
||||
# %%
|
||||
model = MarkovModel(states=[state1, state2], observations=observations, state_transitions=state_transition).populate()
|
||||
|
||||
print(a_matrix)
|
||||
model.reestimated_state_transitions()
|
||||
|
||||
|
||||
# %%
|
||||
|
||||
|
||||
|
||||
BIN
report/StateTopology.odg
Normal file
BIN
report/StateTopology.odg
Normal file
Binary file not shown.
BIN
report/StateTopology.png
Normal file
BIN
report/StateTopology.png
Normal file
Binary file not shown.
|
After 
(image error) Size: 145 KiB |
@ -0,0 +1,11 @@
|
||||
@misc{towards-data-science-markov-intro,
|
||||
author = {Rocca, Joseph},
|
||||
howpublished = {Online},
|
||||
month = feb,
|
||||
organization = {Towards Data Science},
|
||||
title = {Introduction to Markov chains},
|
||||
url = {https://towardsdatascience.com/brief-introduction-to-markov-chains-2c8cab9c98ab},
|
||||
urldate = {2020-12-31},
|
||||
year = {2019}
|
||||
}
|
||||
|
||||
2272
report/report.lyx
2272
report/report.lyx
File diff suppressed because it is too large
Load Diff
BIN
report/res/pdfs-w-obs.png
Normal file
BIN
report/res/pdfs-w-obs.png
Normal file
Binary file not shown.
|
After 
(image error) Size: 42 KiB |
BIN
report/res/pdfs.png
Normal file
BIN
report/res/pdfs.png
Normal file
Binary file not shown.
|
After 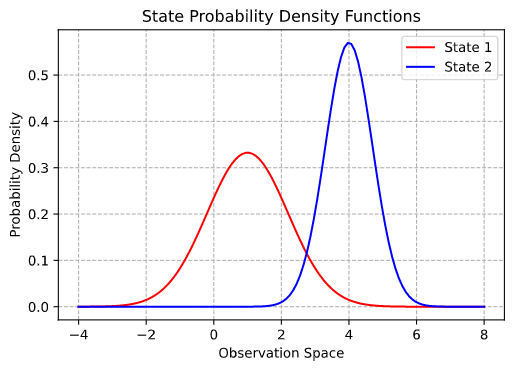
(image error) Size: 37 KiB |
BIN
report/res/re-est-pdfs.png
Normal file
BIN
report/res/re-est-pdfs.png
Normal file
Binary file not shown.
|
After 
(image error) Size: 45 KiB |
@ -11,7 +11,8 @@
|
||||
"\n",
|
||||
"from constants import *\n",
|
||||
"from maths import gaussian\n",
|
||||
"from markov import MarkovModel, LogMarkovModel"
|
||||
"from markov import MarkovModel\n",
|
||||
"from markovlog import LogMarkovModel"
|
||||
]
|
||||
},
|
||||
{
|
||||
@ -344,7 +345,7 @@
|
||||
"name": "python",
|
||||
"nbconvert_exporter": "python",
|
||||
"pygments_lexer": "ipython3",
|
||||
"version": "3.8.4-final"
|
||||
"version": "3.8.6-final"
|
||||
}
|
||||
},
|
||||
"nbformat": 4,
|
||||
|
||||
Loading…
x
Reference in New Issue
Block a user